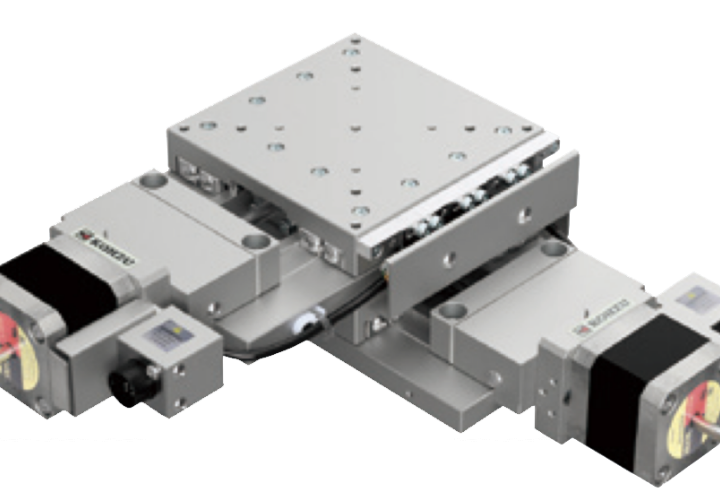
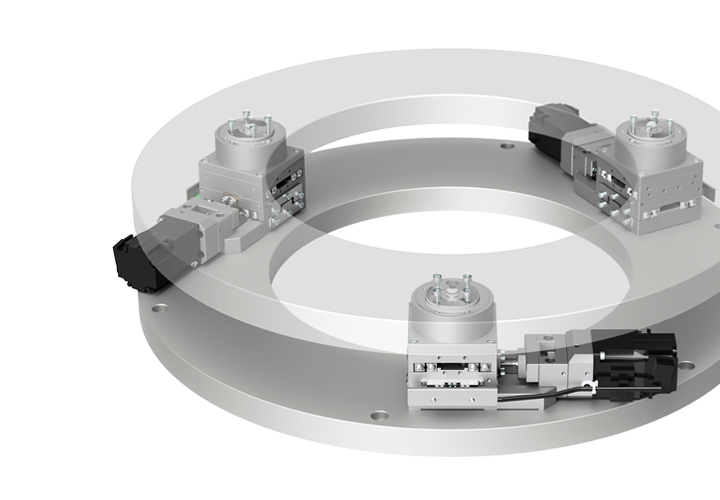
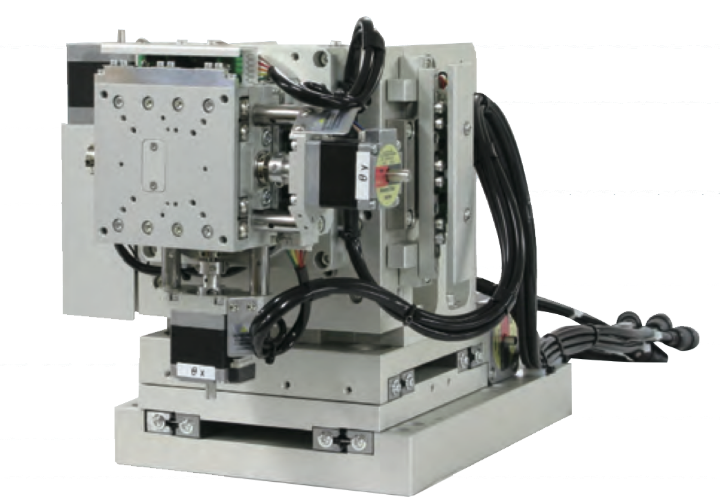
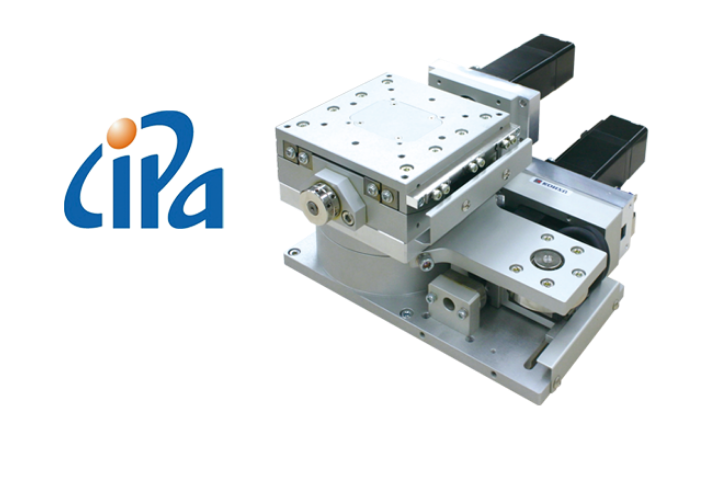
High-precision, compact 6-axis manipulator ideal for fine positioning such as CCD camera element attachment. Compared with conventional manipulators, the MPS series is smaller, lighter, more rigid, and less expensive while maintaining high accuracy. To the list