Understanding X, XY Linear Stage
Understanding Specifications
 |
| YA07A-R103 |
| Specifications | Description | ||
| Model Number | YA07A-R103 | 1. Kohzu's significant alpha-numeric model numbers offer quick product insight. | |
| Mirror Model Number | YA07A-R103-RRR | 2. Mirror symmetry of standard stage. | |
| Table Size | 70mm×70mm | 3. Table size refers to the stage's valid mounting table size. | |
| Guide Mechanism | Cross-Roller Guide | 4. Type of guide mechanism used on this stage. | |
| Motion Range | ±10mm | 5. Stage travel range in the positive and negative directions from it's centered or neutral position. | |
| Lead Mechanism | Ground Screw, Lead 0.5mm | 6. Feeding Mechanism and lead screw pitch. | |
| Resolution | Full/Half Step | 0.5μm/0.25μm | 7. Variation of the stage resolution which is defined by microstep division.。 |
| Micro Step (1/20 div) | 0.025μm | ||
| Maximum Speed | 2.5mm/sec | 8. Maximum Speed of standard stage (half step, 10kpps). | |
| Accumulated Lead Error | ≦10μm/20mm | 9. Refer the "Inspection System" | |
| Repeatability | ≦±0.3μm | 10.Refer the "Inspection System" | |
| Lost Motion | ≦1μm | 11. Refer the "Inspection System" | |
| Straightness | Horizontal | ≦0.5μmm/20mm | 12. Straightness is measured relative to mounting surface |
| Vertical | ≦1μmm/20mm | ||
| Backlash | ≦1μm | 13. Refer the "Inspection System" | |
| Moment Load Stiffness | 0.31 arcsec/N・cm | 14. Refer the "Inspection System" | |
| Load Capacity (Horizontal) | 88.2N(9kgf) | 15. Maximum load capacity is for a horizontally orientated stage with load centered on top-plate. | |
| Material | Aluminum Alloy | 16. Material specification is for stage's main body components only. | |
| Finish | Clear-Matte Anodizing | 17. Surface finish type and color. | |
| Weight | 1.7kg | 18. Stage weight includes all components depicted in product photograph. | |
| Perpendicularity | ≦5μm/20mm | 19. Perpendicularity (or orthogonality) between motion axes in a dual-axis XY stage assembly. | |
| Motor | Five (5) phase stepper motor (Oriental Motor: PK544PMB) Phase Current 0.75A, Basic Step Angle 0.36° | 20. Motor type of standard stage. | |
| Connector | 20Pin Round (Hirose: RP13A-12RA-20PC) | 21. Connector type of standard stage. | |
| Stage Wiring Type | V3 | 22. Wiring type is connection between stage and stepper motor, and photo-sensor. | |
| Price(JPY) | ¥260,000 | 23. Catalog price in Japanese currency. | |
| Overhaul Price * | ¥84,000 〜 | 24. Overhaul price in Japanese currency. | |
| Clean Room Lubricant Change Price | ¥60,000 | 25. Clean Room Lubricant change Price in Japanese currency. | |
| Vacuum Lubricant Change Price | ¥60,000 | 26. Vacuum Lubricant change Price in Japanese currency. | |
| Same Size Motor Change Price | ¥24,000 〜 | 27. Change price of same size motor's mounting as standard motor's in Japanese currency.。 | |
| Different Size Motor Change Price | ¥60,000 〜 | 28. Change price of different size motor's mounting as standard motor's in Japanese currency. | |
* Parts price is not included overhaul price.
Guide Mechanism Type
●Cross-Roller Guide
| In cross-roller guides, quench hardened and precision ground bearing surfaces move upon loose hardened steel cylinders (rollers) with rotation axes oriented in alternating 90 degree angles (Ref. Fig.1). Having rollers arranged in an alternating cross pattern allows preloading and operation at any angle. The roller bearings are held apart from one another by a bearing cage, which prevents adjacent rollers from touching. Since cross roller bearings have little difference between static and dynamic friction they minimize start-to-stop slip-motion typical of other bearing types. The line contact of roller bearings along with precise roller-to-race gap management provide larger load-bearing surfaces, higher preloads and meet very tight runout and stiffness specifications. | 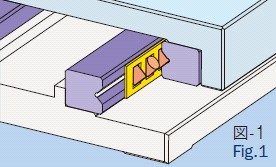 |
●Linear Guide
| The linear guide system consists of a LM rail and steel ball (see Fig. 2). The ball rolls in the groove of the rail, is picked up by an end cap at the bearing end, passes through the circulating hole in the bearing main body, and returns to the other end. Since the sliding surface is fabricated by quenching and abrasive finishing, the rail surface is precise, flat and hard. The ball is caught in the pseudo-cylinder shaped groove formed by the sliding surface and held at two or four points. Since the pseudo-cylinder surface and the bearing are in contact with each other at two points, slipping does not easily occur. | 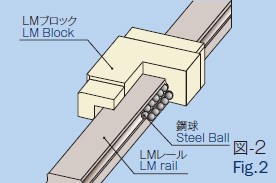 |
Feeding Mechanism
●Ground Screw
| The ground screw is ground at high precision and is held in place by a female screw (see Fig. 3). Since the ground screw and female screw are in contact with each other over a wide area, they do not move even if a horizontal load is applied to the stage. Also compared with the ball screw, the feed distance per rotation can be reduced to improve the resolution. | 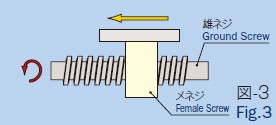 |
●Ball Screw
| The ball screw consists of a screw spindle, a nut, and steel ball between them (Fig. 4). When the screw is rotated, the ball rolls and moves between the ball screw and the nut, and then returns to its original position. Since a ball is rolled, the friction is low, a high transmission efficiency is obtained, the difference between static friction and dynamic friction is small, and stick-slip does not easily occur. |
 |
Resolution
| Resolution of standard stage is calculated based on the following formula. |
ΔX = (p・Δθ/ 360m )
|
| * Kohzu uses two motors with basic step angles of 0.36° / pulse and 0.72° / pulse, and a feed screw pitch of 0.5 to 5mm/rev. The resolution described in this catalog is calculated with two (2) divisions of the standard motor step (half- step, where the value of m is 2). |
Maximum Speed
| Maximum speed depends on motor torque characteristics in higher speed range. However, we calculate maximum speed at 10kpps with motor in half-step mode. Except of 10kpps, the value is fill in each specification. |
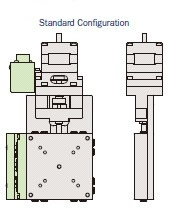
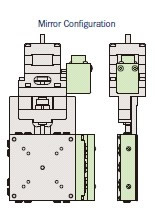
Standard & Reverse Stage Assembly Configurations
| Upon request, we can supply reverse arrangement specifications in which the connector and the sensor are mounted in reverse horizontally. We can also provide a combination stage of a standard and reverse arrangement in the X-Y-direction. |
 |
 |
●XY Stage Assembly Configulation
Assembly model has -*** at the end of model number.
 |
 |
 |
 |
 |
 |
 |
 |