Understanding Rotation Stage
Understanding Specifications
 |
| RA07A-W02 |
| Specifications | Description | ||
| Model Number | RA07A-W02 | 1. Kohzu's significant alpha-numeric model numbers offer quick product insight. | |
| Mirror Model Number | RA07A-W02-R | 2. Mirror symmetry of standard stage. | |
| Table Size | Φ68mm | 3. Table size refers to the stage's valid mounting table size. | |
| Guide Mechanism | Angular Bearing | 4. Type of guide mechanism used on this stage. | |
| Angular Range | ±135° | 5. Stage travel range in the positive and negative directions from it's centered or neutral position. | |
| Lead Mechanism | Worm & Worm Wheel 1/90 | 6. Feeding Mechanism and Reduction Ratio. | |
| Resolution | Full/Half Step | 0.004°/0.002° | 7. Variation of the stage resolution which is defined by microstep division. |
| Micro Step (1/20 div) | 0.0002° | ||
| Maximum Speed | 20°/sec | 8. Maximum Speed of standard stage (half step, 10kpps). | |
| Accumulated Lead Error | ≦0.015°/360° | 9. Refer the "Inspection System" | |
| Lost Motion | ≦0.006° | 10. Refer the "Inspection System" | |
| Angular Repeatability | ≦0.003° | 11. Refer the "Inspection System" | |
| Pitch Error | ≦0.01°/4° | 12. Refer the "Inspection System" | |
| Backlash | ≦0.001° | 13. Refer the "Inspection System" | |
| Surface Run out | ≦20μm/360° | 14. Refer the "Inspection System" | |
| Eccentricity | ≦5μm/360° | 15. Refer the "Inspection System" | |
| Moment Load Stiffness | 0.51 arcsec/N・cm | 16. Moment load stiffness is measured in a direction perpendicular to the motion axis. | |
| Load Capacity (Horizontal) | 58.8N(6kgf) | 17. Maximum load capacity is for a horizontally orientated stage with load centered on top-plate. | |
| Material | Aluminum Alloy | 18. Material specification is for stage's main body components only. | |
| Finish | Clear-Matt Anodizing | 19. Surface finish type and color. | |
| Weight | 1.2kg | 20. Stage weight includes all components depicted in product photograph. | |
| 5 Phase Stepper Motor | PK544PMB(Oriental Motor: Phase Current 0.75A, Basic Step Angle 0.36°, 5-Leads) | 21. Motor type and specification. | |
| Motor Shaft Diameter | Φ5mm Conformance option handle: A type | 22. Indicates the motor shaft diameter and compatible optional handle. | |
| Connector | 20Pin Round (Hirose: RP13A-12JG-20PC) | 23. Connector type of standard stage. | |
| Stage Wiring Type | V3 | 24. Wiring type is connection of stage. | |
| Sensor Model | F-101(HOME,LIMIT) | 26. Sensor model for the stage. | |
| Price(JPY) | ¥205,000 | 26. Catalog price in Japanese currency. | |
| Overhaul Price * | ¥48,000 〜 | 27. Overhaul price in Japanese currency. | |
| Clean Room Lubricant Change Price | ¥36,000 | 28. Clean Room Lubricant change Price in Japanese currency. | |
| Vacuum Lubricant Change Price | ¥36,000 | 29. Vacuum Lubricant change Price in Japanese currency. | |
| Same Size Motor Change Price | ¥12,000 〜 | 30. Change price of same size motor's mounting as standard motor's in Japanese currency. | |
| Different Size Motor Change Price | ¥30,000 〜 | 31. Change price of different size motor's mounting as standard motor's in Japanese currency. | |
* Parts price is not included overhaul price.
Guide Mechanism Type
●Angular Bearing
| The angular bearing has a contact angle appropriate to receive a unidirectional axial load or a combined radial and axial load (see Fig. 1). To use this bearing as a guide system, set two bearings face-to-face on opposite sides. This arrangement provides rigidity for loads both in the radial and axial directions. | 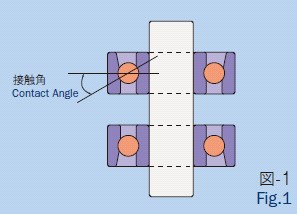 |
●Cross-Roller Bearing
| In cross-roller bearing, quench hardened and precision ground bearing surfaces move upon loose hardened steel cylinders (rollers) with rotation axes oriented in alternating 90 degree angles (Ref. Fig.1). Having rollers arranged in an alternating cross pattern allows preloading and operation at any angle. The roller bearings are held apart from one another by a bearing cage, which prevents adjacent rollers from touching. Since cross-roller bearings have little difference between static and dynamic friction they minimize start-to-stop slip-motion typical of other bearing types. The line contact of roller bearings along with precise roller-to-race gap management provide larger load-bearing surfaces, higher preloads and meet very tight run out and stiffness specifications. | 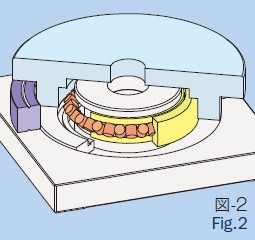 |
Feeding Mechanism
●Worm Shaft & Worm Wheel
| The worm wheel is ground at high precision and the worm shaft was processed with a precision abrasive finish (see Fig. 3). | 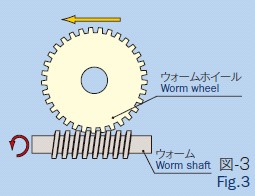 |
Resolution
| Resolution of stage RA05A-W02, RA07A-W02, RA10A-W01, RA16A-WH01 are calculated based on the following formula. |
Δθs = Δθ / n・m |
●Tangent-Bar System (Ball Screw)
| Rotary movement is generated by applying linear displacement to the bar tip extending from the rotary axis in the tangential direction by means of a ball screw.This is the optimum feed system when the rotation range is small but a fine rotary movement at a high resolution is required. |
Resolution
| Resolution of tangent-bar style rotation stage is calculated based on the formula below. |
・ Ideal Resolution |
| Model Number | Δθ | P | R |
| RA05A-T01 | 0.72 | 1 | 27.5 |
| RA07A-T02 | 0..36 | 1 | 42 |
| RA10A-T02 | 0.36 | 1 | 57 |
Maximum Speed
| Maximum speed depends on motor torque characteristics in higher speed area. However, we calculate maximum speed at 10kpps with motor in half-step mode. Except of 10kpps, the value is fill in each specification. |